Contents
olynmpbayes.m
From A First Course in Machine Learning, Chapter 2. Simon Rogers, 01/11/11 [simon.rogers@glasgow.ac.uk] Bayesian treatment of Olympic data
clear all;close all;
Load Olympic data
load ../data/olympics x = male100(:,1); t = male100(:,2); % Rescale x for numerical stability x = x - x(1); x = x./4;
Define the prior
$p(\mathbf{w}) = {\cal N}(\mu_0,\Sigma_0)
mu0 = [0;0];
si0 = [100 0;0 5];
ss = 2; % Vary this to see the effect on the posterior samples
Draw some functions from the prior
path(path,'../utilities'); w = gausssamp(mu0,si0,10); X = [x.^0 x.^1]; % Plot the data and the function figure(1);hold off plot(x,t,'bo','markersize',10); hold on xl = xlim; yl = ylim; for i = 1:10 plot(x,X*w(i,:)','r'); end xlim(xl); ylim(yl);
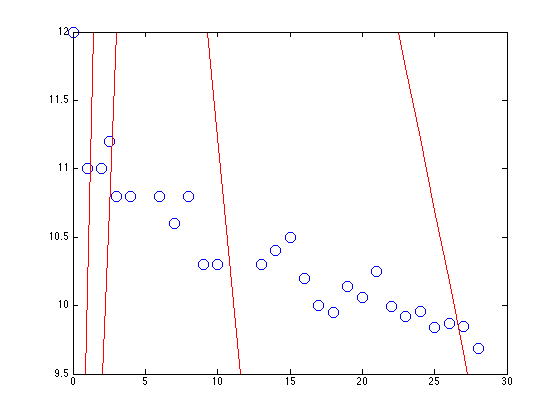
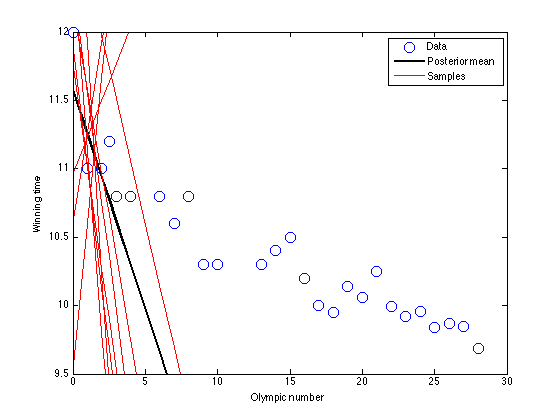
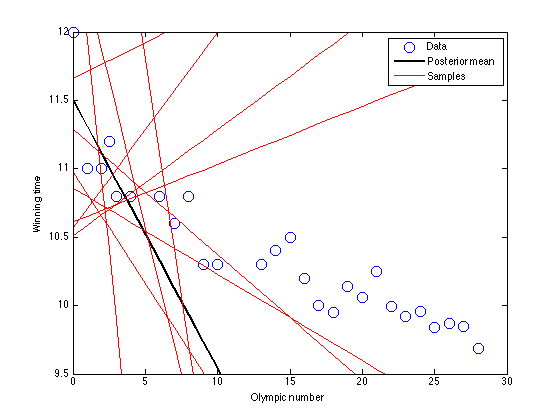
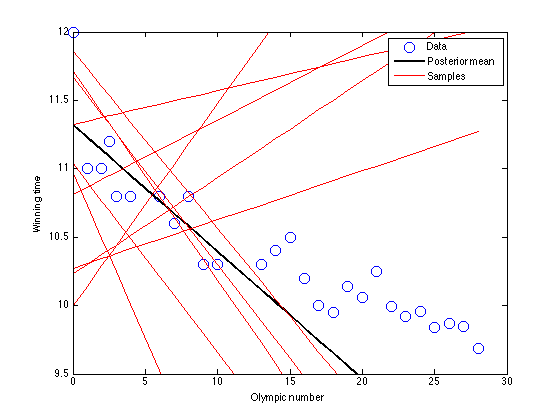
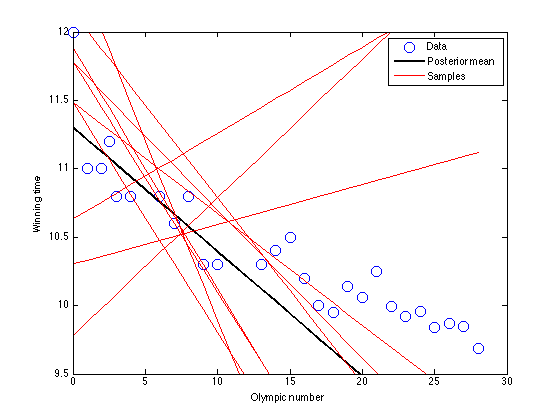
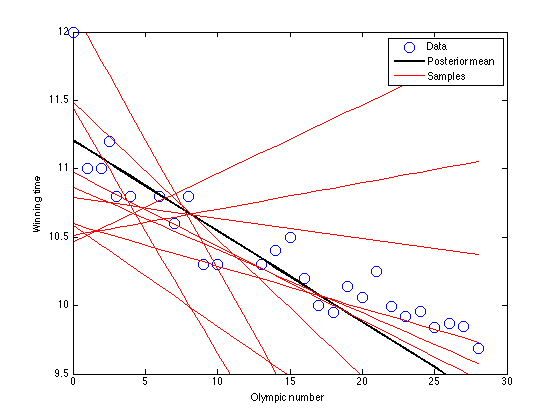
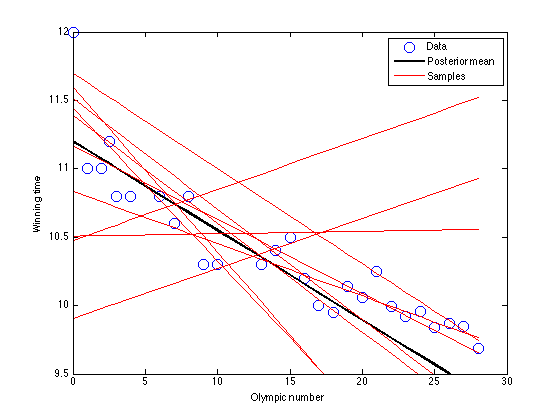
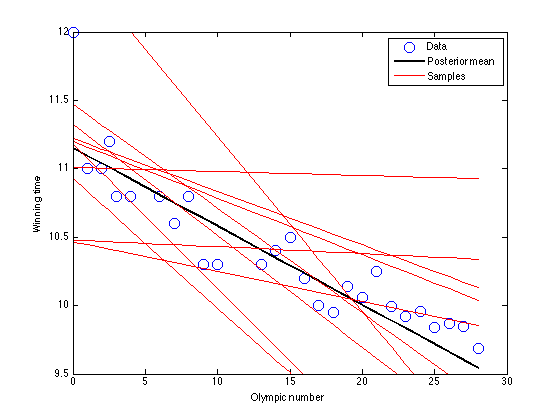
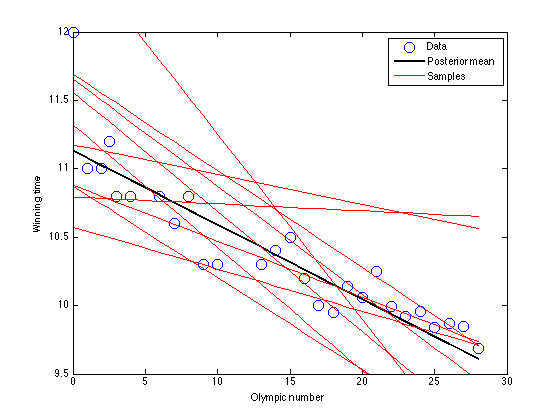
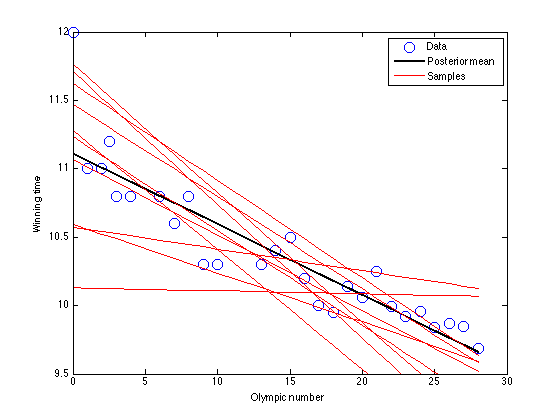
Add the data 3 points at a time
dord = [3:3:length(x)];
for i = 1:length(dord)
Xsub = X(1:dord(i),:);
tsub = t(1:dord(i));
siw = inv((1/ss)*Xsub'*Xsub + inv(si0));
muw = siw*((1/ss)*Xsub'*tsub + inv(si0)*mu0);
figure(1);hold off
plot(x,t,'bo','markersize',10);
hold on
xl = xlim;
yl = ylim;
plot(x,X*muw,'k','linewidth',2);
wsamp = gausssamp(muw,siw,10);
for j = 1:10
plot(x,X*wsamp(j,:)','r');
end
xlim(xl);
ylim(yl);
legend('Data','Posterior mean','Samples')
xlabel('Olympic number');
ylabel('Winning time');
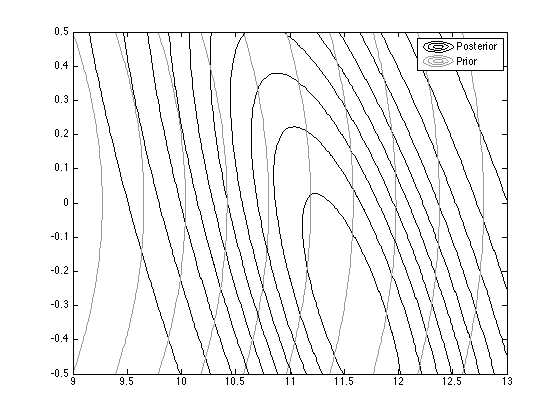
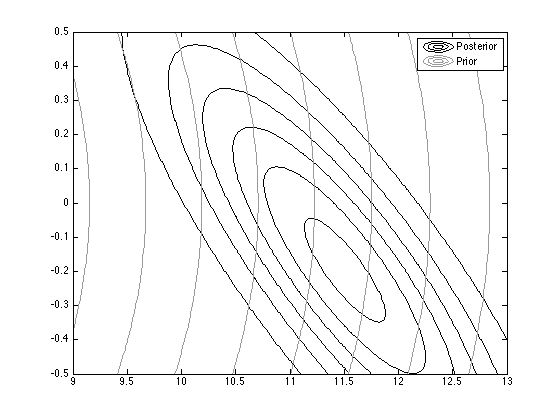
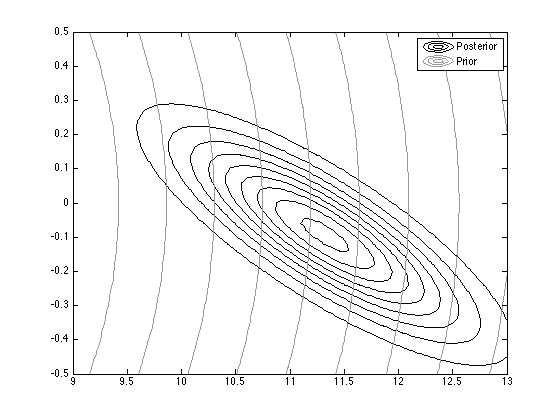
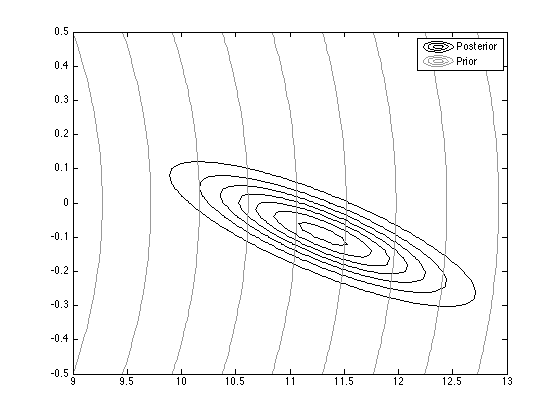
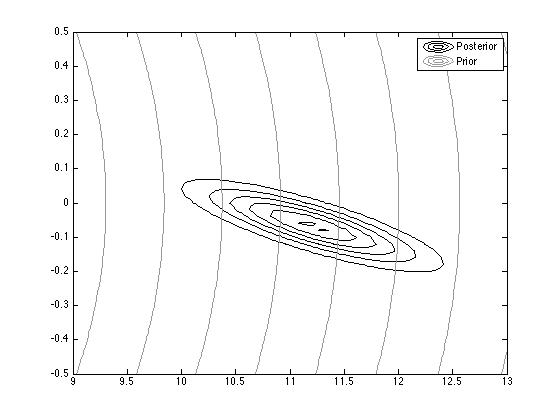
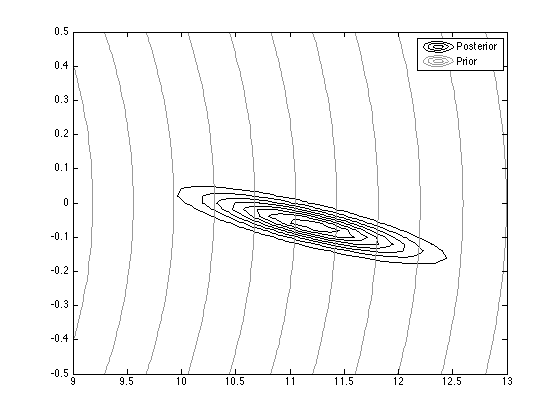
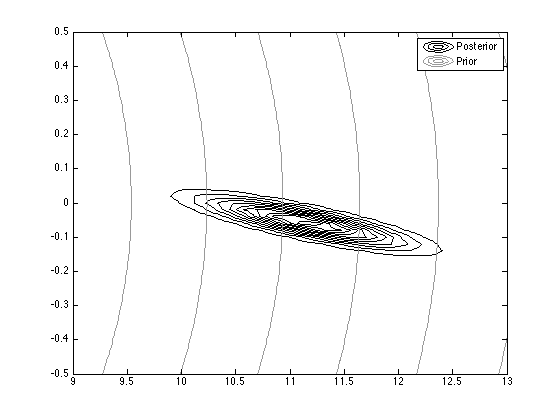
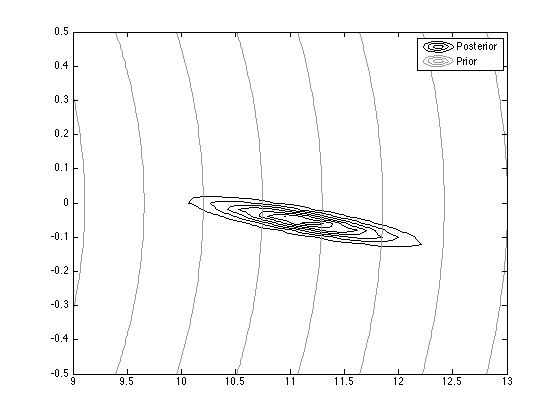
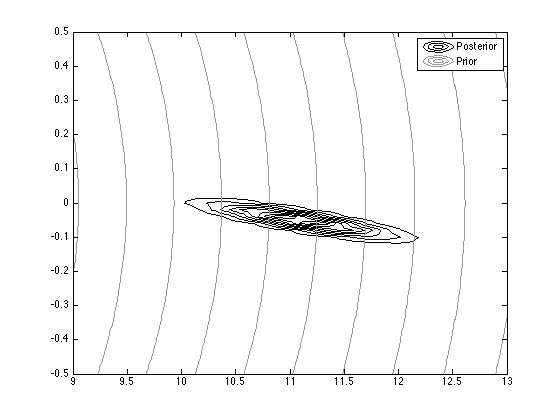
% Contour plot the prior and posterior
[Xv,Yv] = meshgrid(9:0.02:13,-0.5:0.02:0.5);
const = (1/sqrt(2*pi))^2;
const_prior = const./sqrt(det(si0));
const = const./sqrt(det(siw));
temp = [Xv(:)-muw(1) Yv(:)-muw(2)];
temp_prior = [Xv(:)-mu0(1) Yv(:)-mu0(2)];
pdfv = const*exp(-0.5*diag(temp*inv(siw)*temp'));
pdfv = reshape(pdfv,size(Xv));
pdfv_prior = const*exp(-0.5*diag(temp_prior*inv(si0)*temp_prior'));
pdfv_prior = reshape(pdfv_prior,size(Xv));
figure(2);hold off
contour(Xv,Yv,pdfv,'color','k');
figure(2);hold on
contour(Xv,Yv,pdfv_prior,'color',[0.6 0.6 0.6]);
legend('Posterior','Prior');
end