[Scroll down for more news!]
April 2022 Simon Dobson gave an invited talk for LEISYS'2022, on Sensor Tensors.
April 2022 Simon Dobson gave an invited talk to the School of Computer Science and Information Technology, University College Cork, on Sensor interpretation data wrangling.
March 2022 Julie McCann is University of York Distinguished Seminar for International Women’s Day, "Finding Rubies in the Dust: A conversation about Cyber-physical Interaction".
March 2022 Julie McCann gives a Turing Talk on "A day in the life of a Smart City", BCS/IET London.
Sept 2021 Clare Dixon is an invited speaker at the 15th Int. Conf. on Reachability Problems (RP'21).
Sept 2021 Clare Dixon is an invited speaker at Formal Methods for Autonomous Systems 2021 (FMAS), which will take place Oct 2021. The title of the talk is Help or Hazard: Towards Verifying Autonomous Robot Systems.
May 2021 Michael Fisher gave an invited talk at the CPS-IoT Week Workshop: MACHINE LEARNING IN CONTROL (LEAC), 2021 on Verifying Autonomous Systems.
May 2021 Michael Fisher is the co-organiser of the 2021 CPS-IoT Week Workshop: Verification of Autonomous and Robotic Systems (VARS).
3 June 2020 Julie McCann's research group, Adaptive Emergent Systems Engineering, won the The President’s Awards for Excellence in Research 2020. This Award celebrates outstanding achievements of research teams at Imperial College London, recognising outstanding research that delivers impact, a teamss international standing and their beneficial contribution to Imperial College London.
18 Feb 2020 Michele Sevegnani gave a talk on "Problems of uncertainty in sensor systen software" at the London Interdisciplinary Doctoral Programme during the Teaching Week Day 2: Software Engineering.
Feb 2020 Our next all-hands meeting will take place at Imperial College London on 11 - 12 June 2020.
Jan 2020 Fabio Papacchini and Georgios Kourtis from the Department of Computer Science, University of Liverpool will soon join us.
Jan 2020 Prof Simon Dobson will give a departmental talk at the School of Computing Science, University of Glasgow, titled "How good is my dataset?" on Friday 20 March 2020, 15:00-16:00.
Jan 2020 Prof Muffy Calder will give this term's Strachey Lecture in Computer Science at the Department of Computer Science, University of Oxford, on 3 March 2020. The title of the talk is "Formal Methods reinvented: now with users, data, and inference". More details can be found here.
7-10 Jan 2020 Our third research retreat will take place as usual in North Berwick, Scotland, UK.
Nov 2019 Seven Linker will give a talk on "Target Counting with Wireless Sensor Networks: Spatio-Temporal Models and Presburger Arithmetic" at the workshop "Spatio-Temporal Reasoning for Control of Cyber-Physical Systems" in Nice, France, on the 10th December 2019.
Oct 2019 Sven Linker co-organised the Dagstuhl Seminar 19432 on the topic of Analysis of Autonomous Mobile Collectives in Complex Physical Environments
Aug 2019 Lei Fang will give a talk on "Human Activity Mining with Directional Statistical Models" at SICSA Ambient Assisted Living (AAL) Summer School, Heriot-Watt University, Edinburgh, Scotland, 6-8 August 2019.
July 2019 All-hands meeting taking place in Glasgow 31 July - 1 August 2019.
June 2019 Oana Andrei and Michele Sevegnani are organising the first Scottish Seminar on Formal Modelling, Verification, and Synthesis at the School of Computing Science, University of Glasgow, on 9 September 2019. This is a SICSA-funded workshop co-located with the QEST'19 international conference.
June 2019 Oana Andrei is the Local Chair of the QEST'19 conference.
May 2019 Michele Sevegnani gave a talk on "Bigraphs with sharing and their algebra" on 24 May 2019 at the Mathematically Structured Programming Group seminar, Computer and Information Science, University of Strathclyde, Glasgow, UK.
25 April 2019 Michael Fisher is awarded the prestigious Royal Academy of Engineering award Chair in Emerging Thechnologies.
April 2019 Michael Fisher co-organised the Dagstuhl Seminar 19171 on the topics of "Ethics and Trust: Principles, Verification and Validation".
April 2019 Oana Andrei and Muffy Calder's paper "Interpreting Computational Models of Interactive Software Usage" co-authored with Matthew Chalmers and Alistair Morrison was accepted at the ACM CHI workshop Computational Modeling in Human-Computer Interaction taking place on 5 May 2019 in Glasgow, UK.
March 2019 Oana Andrei is PC member of the 1st Workshop on Cognition: Interdisciplinary Foundations, Models and Applications (CIFMA'19) (co-located with SEFM'19).
March 2019 Oana Andrei is PC member of the 8th Workshop on Formal Methods for Interactive Systems (FMIS'19) (co-located with FM'19).
Jan 2019 Muffy Calder and Michele Sevegnani's paper Stochastic Model Checking for Predicting Component Failures and Service Availability was published in IEEE Transactions on Dependable and Secure Computing, vol. 16(1), January 2019.
7-10 Jan 2019 Our second all-hands retreat in North Berwick.
Dec 2018 Oana Andrei is co-organiser of the 8th International Symposium "From Data to Models and Back (DataMod 2019)", part of the FM week (the 3rd World Congress on Formal Methods), Porto, Portugal, 7-8 October 2019.
Dec 2018 Michele Sevegnani is the Publicity Chair for the 16th the International Conference on Quantitative Evaluation of Systems QEST'19 which will take place at the University of Glasgow, 10-12 September 2019.
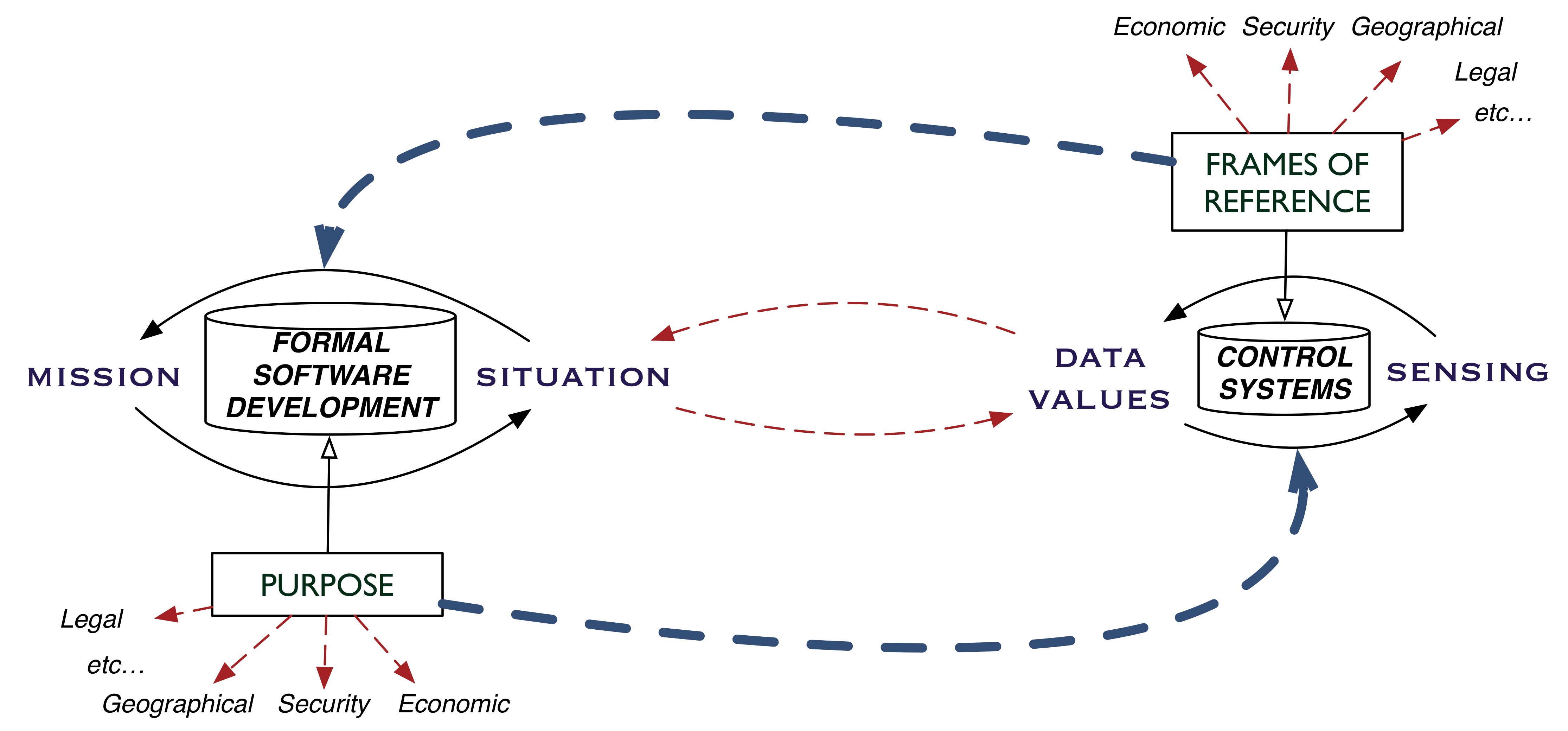
Nov 2018 The paper "Making Sense of the World: Framing Models for Trustworthy Sensor-Driven Systems" by Muffy Calder, Simon Dobson, Michael Fisher and Julie McCann is published in Computers 2018, 7(4), 62.
Nov 2018 Michele Sevegnani and Muffy Calder's paper Modelling and Verification of Large-Scale Sensor Network Infrastructures co-authored with Milan Kabac and Julie A. McCann was appeared in the proceedings of IEEE International Conference on Engineering of Complex Computer Systems (ICECCS 2018), December 2018.
14 Nov 2018 Paul Gainer, Sven Linker, Clare Dixon, Ullrich Hustadt and Michael Fisher won the Best Paper Award at the 20th International Conference on Formal Engineering Methods (ICFEM 2018) for their paper "The Power of Synchronisation: Formal Analysis of Power Consumption in Networks of Pulse-Coupled Oscillators".
12 Nov 2018 Oana, Muffy, Julie, Anqi, Ivana, Michael, Yasmeen and Lei met up at Imperial College London to talk about modelling various aspects of the smart water distribution network testbed WaterBox.
18 Oct 2018 Muffy Calder gave the 2018 BCS Karen Sparck Jones lecture, presenting a personal reflection on the role of models in computer science and providing unique insight into the world of modelling systems.
15 - 19 Oct 2018 Michele Sevegnani visited CARDC (China Aerodynamics Research and Development Center) in Sichuan Province, P.R. China. Michele gave the lectures "Reliability analysis and forecasting for assets management" and "Computational models for autonomous navigation and mixed-reality systems".
11 Oct 2018 Simon Dobson gave a keynote on "Making the transition from sensors to sensor systems software" at the Conference on Design and Architectures for Signal and Image Processing (DASIP 2018) in Porto, Portugal.
8 Oct 2018 Julie McCann is one of the twelve holders of the 2018 Suffrage Science Awards in Maths and Computing, presented to celebrate her scientifique achievement and her ability encourage and inspire others to enter science and reach senior leadership roles.
20 Sept 2018 All-hands meeting with invited members of the advisory board taking place at Imperial College London.
3 July 2018 Julie McCann will give the welcoming and introduction talk at the official launch of the Centre for Smart Connected Futures, a new multi-disciplinary research network at Imperial College London.
21 June 2018 Michael Fisher visited Geneva to attend a meeting of experts organised by the International Committee of the Red Cross to discuss the limits of, and issues around, autonomy in relation to autonomous weapon systems. More details here.
12 June 2018 Michele Sevegnani gave an invited talk on “Air navigation services assets management with stochastic model checking” at the “EU-China Workshop on Aviation, Air Traffic Management, Safety and Security” (part of ECCOMAS 2018) held at the University of Glasgow.
6 June 2018 Next all-hands meeting taking place in windy St Andrews.
24 April 2018 We are seeking one Postdoctoral Researcher to join the Glasgow team. More details can be found here and here. Application closing date: 22 May 2018.
6 Oct 2017 Prof Muffy Calder will give an invited talk at the CENSIS 4th Technology Summit and Conference 2017, which will take place in Glasgow, 2 November 2017.
5 Oct 2017 Our fourth all-hands meeting taking place in Manchester.
Aug 2017 Organising the first ACM International Workshop on the Engineering of Reliable, Robust, and Secure Embedded Wireless Sensing Systems (FAILSAFE).
23 - 24 May 2017 Our third all-hands meeting is taking place in Glasgow and it includes, for the first time, members of the advisory board.
7 Dec 2016 Prof Julie McCann delivered a distinguished seminar at the School of Computing & Communications, Lancaster University. The title of the talk was Are Sensor Networks a first step towards the Diamond Age?
7 Nov 2016 Prof Julie McCann delivered a set of distinguished lectures centred around Distributed Systems and Sensing at the School of Computer Science, University of St Andrews.
14 Oct 2016 Second all-hands meeting located at Imperial College London. Take a look at our group photo!
13 Oct 2016 Interest meeting on the Gossip and the Firefly protocols at Imperial College London.
10 Oct 2016 Muffy Calder was presented one of the twelve Suffrage Science Awards in Maths and Computing to celebrate her scientific achievements and ability to inspire others.
15 June 2016 Dr Sven Linker will join us as postdoctoral researcher in Liverpool, starting on 1 August 2016. He is currently a Research Fellow in the School of Computing, Engineering and Mathermatics, University of Brighton.
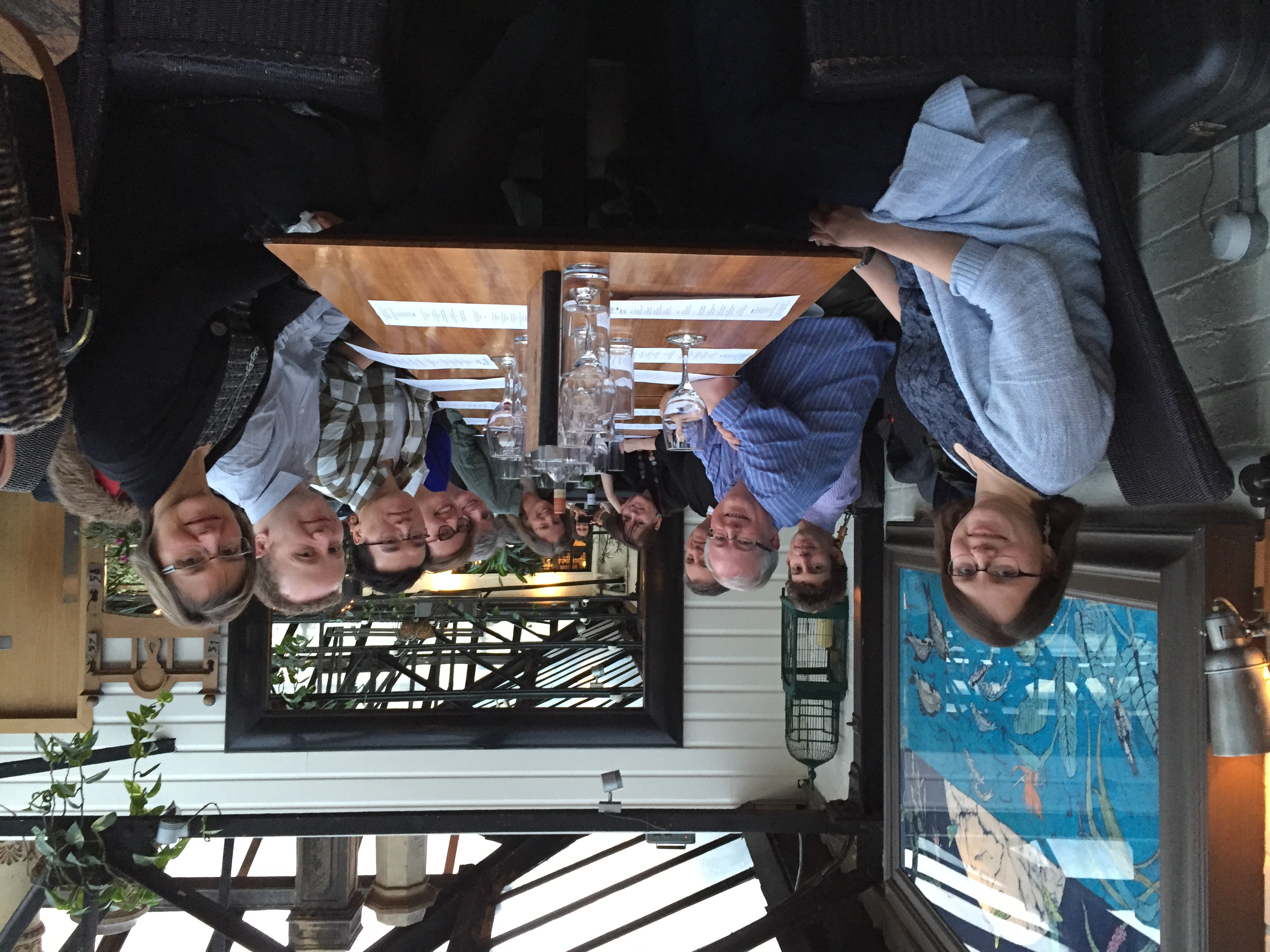
25 - 26 April 2016 The first all-hands meeting was a resounding success: interesting talks generating many discussions around them, activities and research goals planned for the following months. Take a look at our dinner photo!
10 March 2016 The press release in the Imperial College London news about S4 as a new project that will ensure information gathered by sensors is reliable.
11 Feb 2016 We are seeking two Postdoctoral Research Associates in Formal Verification of Autonomous Sensor Network Software at University of Liverpool. More details can be found here.
1 Feb 2016 Our kick off meeting will take place in Glasgow on 25 - 25 April 2016.
29 Jan 2016 More digital press articles about us: Herald Scotland, Osborne Clarke, Global Post, Daily Record, CENSIS, my Science, v3, Machinery Market, Internet of Business.
11 Jan 2016 First press releases in the University of Glasgow news, University of Liverpool news.
5 Jan 2016 The S4 programme started! Let's roll!















{kind=link}
{kind=link}